
























作品詳情
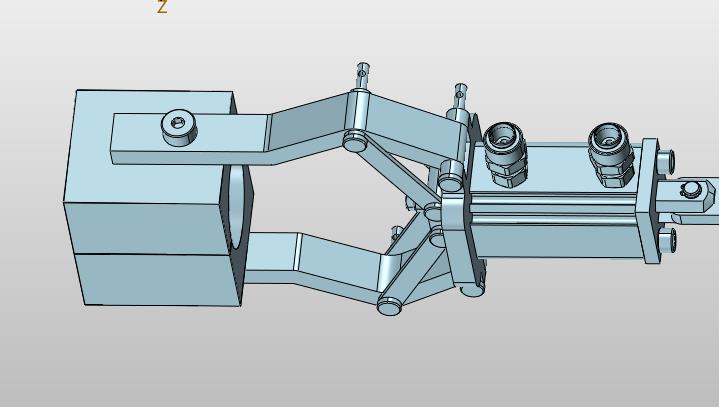
氣動四連桿長臂抱緊夾爪是一種利用氣壓驅動、具有四個連桿機構及長臂設計的夾持工具。它通過四連桿機構實現(xiàn)靈活運動,長臂設計則提供了較大的工作行程和夾持力度。該夾爪能夠緊密抱持物體,適用于各種工業(yè)環(huán)境中的抓取、搬運和固定作業(yè)。其專業(yè)特點包括高效、穩(wěn)定、耐用,并能適應不同形狀的物體夾持。
全國咨詢熱線 010-53652212(工作日) | 152 0110 5575、152 1011 0562(周末) 


















