
























作品詳情
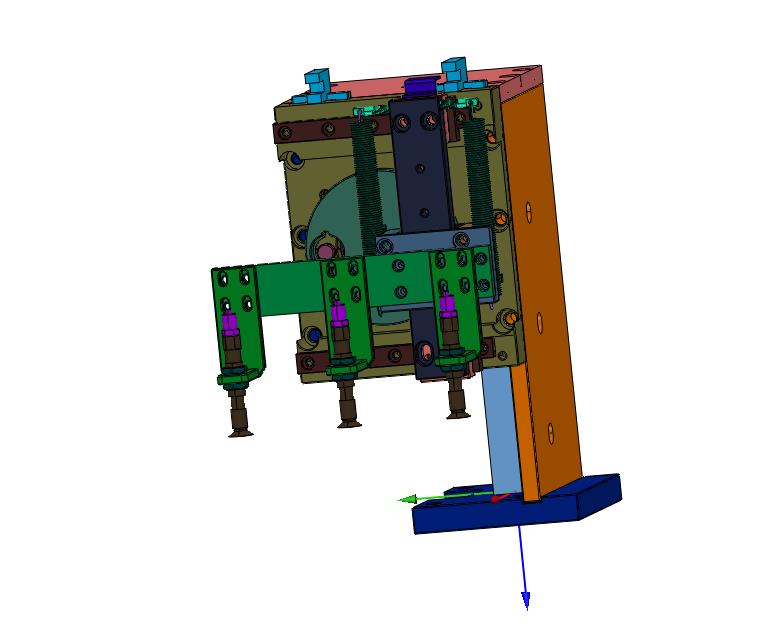
伺服驅(qū)動高速吸盤抓手是一種高效、精準的控制執(zhí)行裝置,其核心技術在于伺服驅(qū)動系統(tǒng)。該裝置通過高速旋轉(zhuǎn)的吸盤抓手,精確控制抓取物體的位置和力度,實現(xiàn)高速、高精度的物料搬運。其內(nèi)部配備的伺服電機和精密減速器,能夠快速響應控制指令,確保吸盤抓手在瞬間完成動作,適用于高速生產(chǎn)線上的物料抓取和轉(zhuǎn)移。此外,該裝置還具有高度的靈活性和穩(wěn)定性,能夠適應不同形狀和重量的物料抓取需求。



平diy桌面級快速成型3D打印機")




動臺袋子印畫設備")










