
























作品詳情
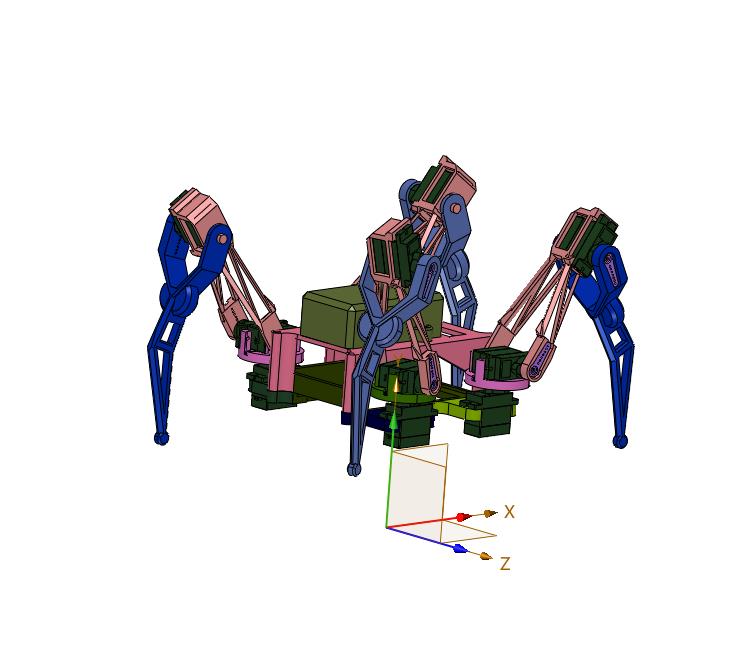
空間四足爬行機器人是一種采用四足爬行方式的先進機器人,具有在復雜環(huán)境中高效移動的能力。這種機器人通常采用高度靈活的機械結(jié)構(gòu),配備先進的傳感器和控制系統(tǒng),以實現(xiàn)精確的運動控制和環(huán)境感知。其主要特點包括強大的地形適應性、高效的運動能力和高度的穩(wěn)定性。通過先進的算法和控制系統(tǒng),四足爬行機器人可以在各種地形上實現(xiàn)穩(wěn)定爬行,并在執(zhí)行任務(wù)時表現(xiàn)出高度的自主性和智能性。



平diy桌面級快速成型3D打印機")




動臺袋子印畫設(shè)備")










