
























作品詳情
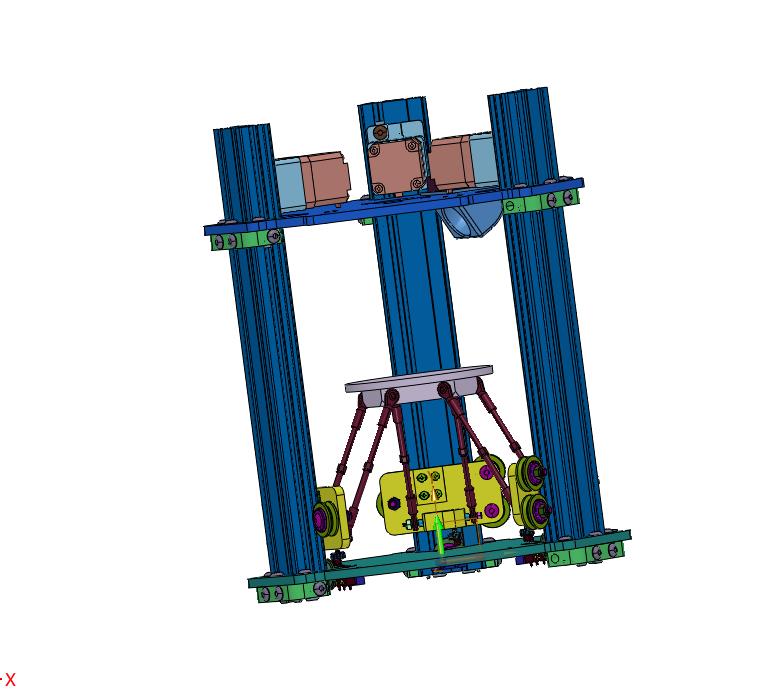
全柔性三自由度并聯(lián)移動平臺是一種先進的機械裝置,具備在三個方向上的獨立運動能力。它通過并聯(lián)機構(gòu)設(shè)計,實現(xiàn)平臺的高精度移動和定位。該平臺具有全柔性結(jié)構(gòu),能夠適應(yīng)各種復(fù)雜環(huán)境和工作需求。其運動學(xué)特性使得平臺能夠?qū)崿F(xiàn)高效、穩(wěn)定的運動,廣泛應(yīng)用于工業(yè)自動化、機器人技術(shù)等領(lǐng)域。



平diy桌面級快速成型3D打印機")




動臺袋子印畫設(shè)備")










